
") STM32C0開發(fā)(1)----SPI 驅(qū)動WS2812燈珠
STM32C0開發(fā)(1)----SPI 驅(qū)動WS2812燈珠
本文介紹了如何使用STM32微控制器,結(jié)合STM32CubeMX配置工具和SPI通訊接口,來驅(qū)動和控....
STM32H5開發(fā)(7)----LCD顯示TOF檢測數(shù)據(jù)
"自主模式"(Autonomous mode)通常指的是設備或系統(tǒng)能夠在沒有外部輸入的情況下獨立完成....
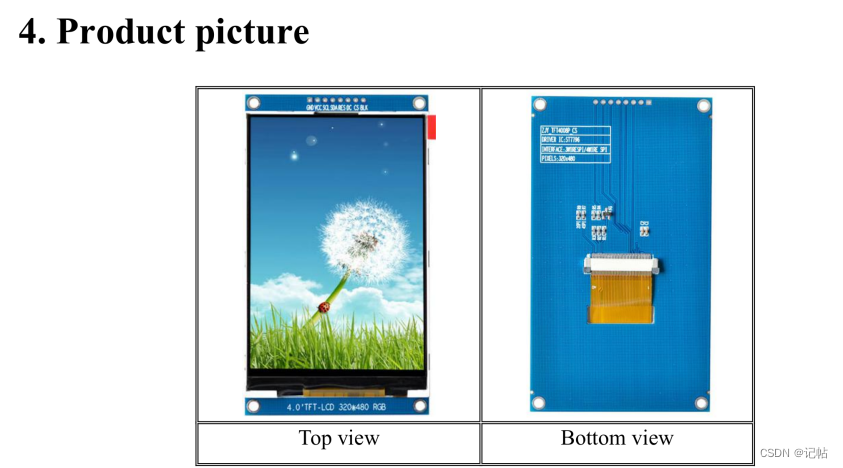
STM32H5開發(fā)(6)----SPI驅(qū)動TFT-LCD屏
在嵌入式領(lǐng)域,TFT-LCD屏是最常用的顯示解決方案之一,因為它們提供了豐富的顏色和高分辨率的圖像顯....
VL53L5CX驅(qū)動開發(fā)(5)----運動閾值檢測
本章目的是展示如何充分利用VL53L5CX傳感器的高級特性,通過結(jié)合運動指示器和閾值檢測功能,實現(xiàn)對....
VL53L5CX驅(qū)動開發(fā)(1)----驅(qū)動TOF進行區(qū)域檢測
VL53L5CX是一款先進的飛行感應(FlightSense)產(chǎn)品系列的飛行時間(ToF)多區(qū)間測距....
VD6283TX環(huán)境光傳感器驅(qū)動開發(fā)(3)----測試閃爍頻率代碼
ST提供了6283A1_AnalogFlicker代碼在X-NUCLEO-6283A1獲取閃爍頻率,....
VD6283TX環(huán)境光傳感器驅(qū)動開發(fā)(2)----獲取光強和色溫
為了更好地利用VD6283TX傳感器的特點和功能,本章專門用于捕獲光強度和相關(guān)色溫值。VD6283T....
VD6283TX環(huán)境光傳感器驅(qū)動開發(fā)(1)----獲取ID
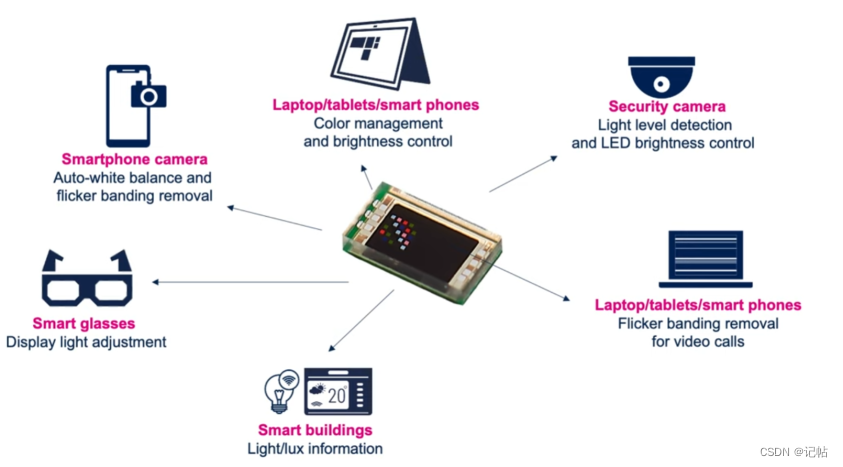
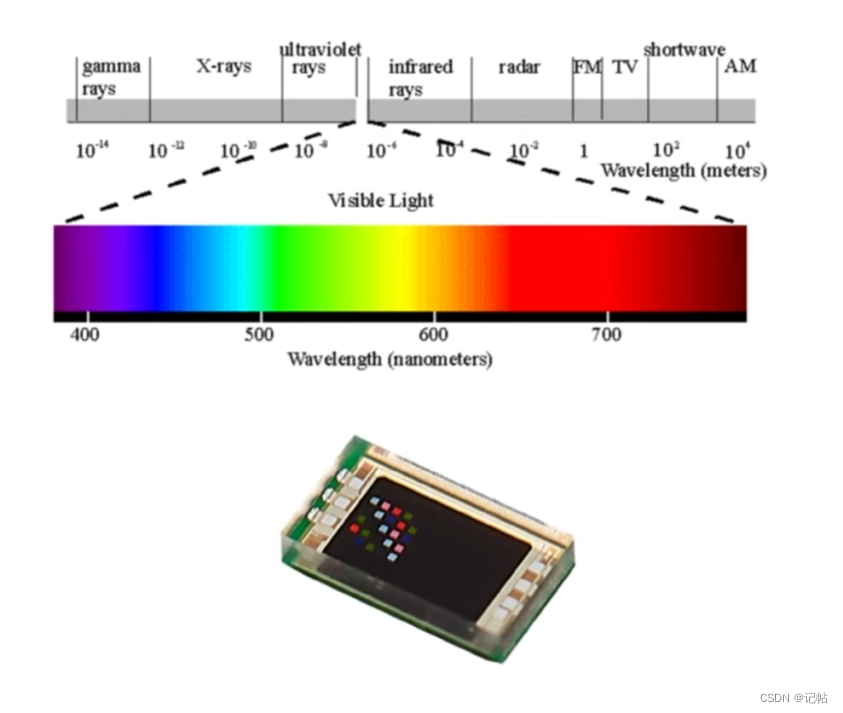
環(huán)境光傳感器是一種光電探測器,能夠?qū)⒐廪D(zhuǎn)換為電壓或者電流,使用多光譜環(huán)境光傳感器為了測量光譜上特定波....
STM32WB55開發(fā)(5)----調(diào)整射頻功率
隨著無線通信技術(shù)的不斷進步,能夠精確地控制射頻(RF)信號的功率變得越來越重要。調(diào)整射頻功率不僅可以....
STM32WB55開發(fā)(4)----配置串口打印Debug調(diào)試信息
在STM32WB55系列微控制器上進行開發(fā)時,實時監(jiān)控應用程序的運行情況和調(diào)試潛在問題是至關(guān)重要的。....
基于STM32CUBEMX驅(qū)動TOF模塊VL53l0x(3)----驅(qū)動多個VL53L0X
在本章中,我們將探討如何同時驅(qū)動多個VL53L0X傳感器進行距離測量。我們將介紹如何有效地管理多個傳....
基于STM32CUBEMX驅(qū)動TOF模塊VL53l0x(2)----修改設備地址
本章主要介紹如何修改VL53L0X傳感器的I2C地址,并成功驅(qū)動設備以使用新的地址。VL53L0X是....
基于STM32CUBEMX驅(qū)動TOF模塊VL53l0x(1)----單模塊距離獲取的最佳實踐
VL53L0X是新一代飛行時間(ToF)激光測距模塊(不同于傳統(tǒng)技術(shù)),采用目前市場上最小的封裝,無....
STM32WB55開發(fā)(2)----修改藍牙地址
在嵌入式藍牙開發(fā)中,特別是針對STM32WB系列,修改或配置藍牙設備地址是常見的需求。不論是為了實現(xiàn)....
STM32WB55開發(fā)(1)----監(jiān)測STM32WB連接狀態(tài)
STM32WB系列微控制器代表了STMicroelectronics在無線技術(shù)領(lǐng)域的新一代創(chuàng)新,集成....
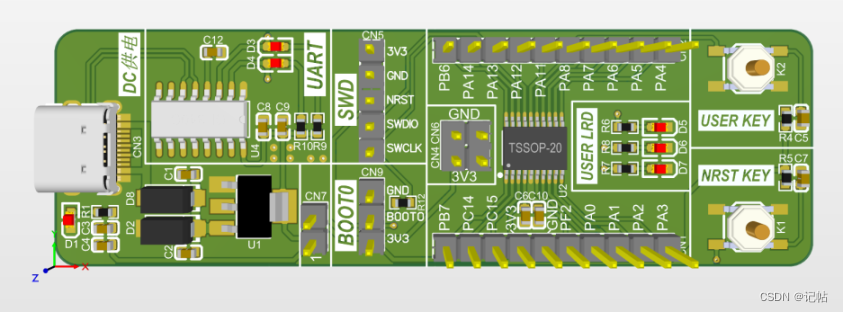
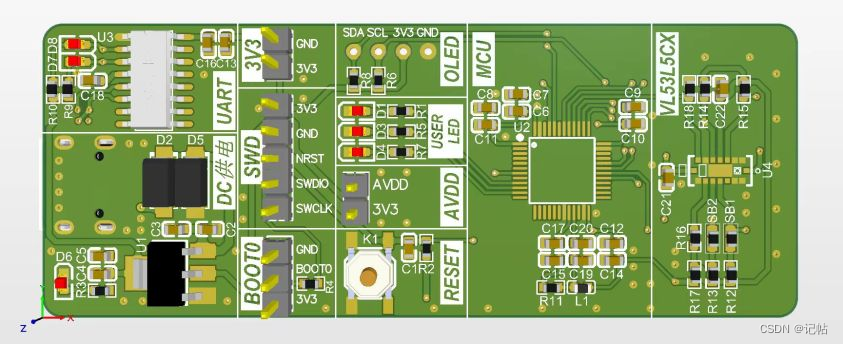
STM32WB55開發(fā)(1)----套件概述
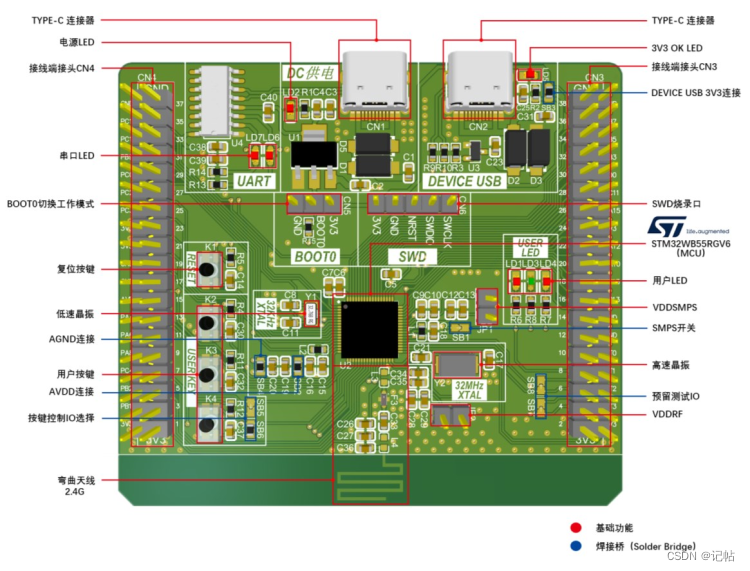
所使用的器件是我們自行設計的開發(fā)板,該開發(fā)板是基于 STM32WB55 系列微控制器所構(gòu)建。STM3....
基于STM32CUBEMX驅(qū)動TMOS模塊STHS34PF80(6)----獲取狀態(tài)數(shù)據(jù)
STHS34PF80傳感器項目種修改 Arduino 腳本,重新移植到STM32的MCU中。
該項....
基于STM32CUBEMX驅(qū)動TMOS模塊STHS34PF80(5)----配置嵌入式函數(shù)
STHS34PF80傳感器項目種修改 Arduino 腳本,重新移植到STM32的MCU中。
基于STM32CUBEMX驅(qū)動TMOS模塊STHS34PF80(4)----中斷獲取信號
SHS34PF80的數(shù)據(jù)準備信號提供了一種機制,允許設備在新的測量數(shù)據(jù)可讀取時通知系統(tǒng),并觸發(fā)同步操....
基于STM32CUBEMX驅(qū)動TMOS模塊STHS34PF80(3)----修改檢測閾值
用于配置和設置 STHS34PF80 傳感器的一些參數(shù),以便進行存在檢測和運動檢測。
基于STM32CUBEMX驅(qū)動TMOS模塊STHS34PF80(2)----驅(qū)動STHS34PF80進行人體檢測
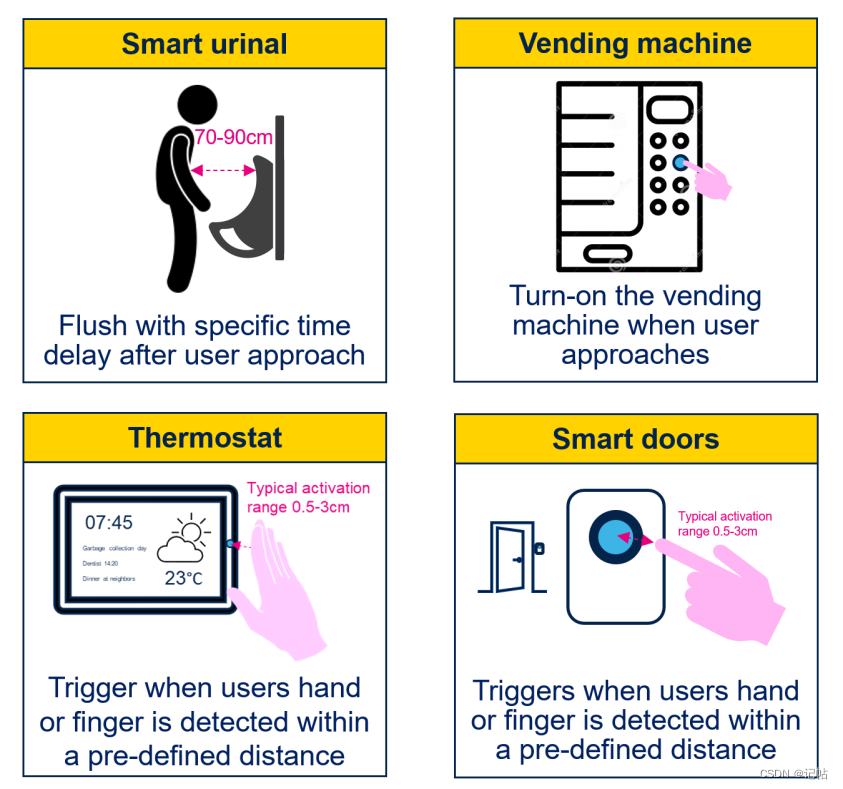
STHS34PF80 是一款非冷卻、工廠校準的紅外運動和存在檢測傳感器,工作波長在 5 μm 至 2....
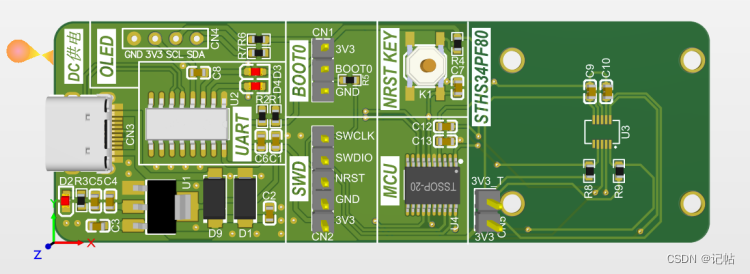
基于STM32CUBEMX驅(qū)動TMOS模塊STHS34PF80(1)----獲取ID
STHS34PF80 是一款非冷卻、工廠校準的紅外運動和存在檢測傳感器,工作波長在 5 μm 至 2....
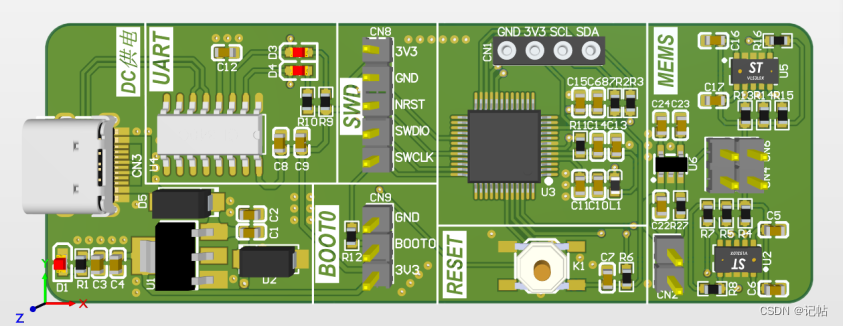
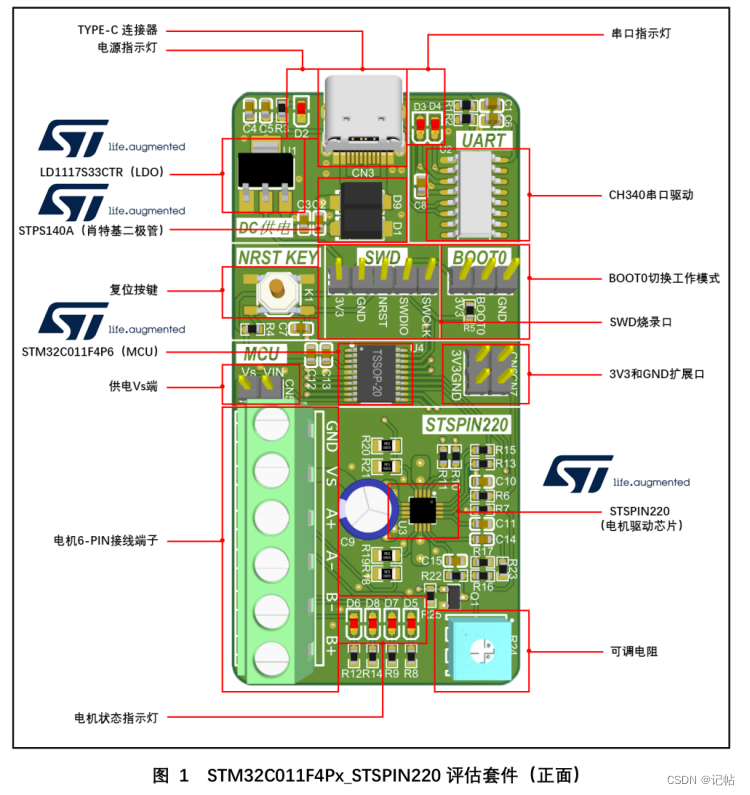
基于STM32CUBEMX驅(qū)動低壓步進器電機驅(qū)動器STSPIN220(3)----定時器中斷產(chǎn)生指定數(shù)量脈沖
在步進電機控制過程中,為了實現(xiàn)精確的位置和速度控制,經(jīng)常需要輸出指定數(shù)量的脈沖。這就需要使用定時器功....



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)